resistive proximity sensor
- time:2025-06-24 01:37:09
- Click:0
Resistive Proximity Sensors: The Direct Contact Detection Solution
In a world increasingly driven by automation and smart interaction, sensors are the silent observers enabling machines to perceive their surroundings. While technologies like infrared or ultrasonic sensors capture headlines for their non-contact abilities, another pervasive and fundamentally simple principle quietly powers countless everyday tasks: the Resistive Proximity Sensor. But how does this unassuming technology work, where is it most valuable, and why does its simple touch-based mechanism remain crucial in modern engineering? Let’s explore the reliable world of resistive sensing.
At its core, a resistive proximity sensor operates on a beautifully straightforward concept: physical contact changes electrical resistance. Unlike its proximity-sensing cousins (inductive, capacitive, ultrasonic, etc.) that detect objects without touching them, a resistive sensor fundamentally relies on making direct mechanical contact with the target object to trigger its response.
Here’s the core working principle:
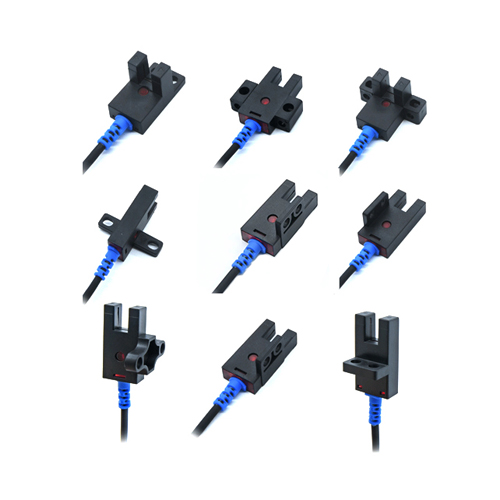
- Structure: Imagine a simple switch mechanism. The sensor typically consists of a movable actuator (like a plunger, lever, or flexible dome) coupled with internal electrical contacts. These contacts form part of an electrical circuit.
- Resting State: When no object is present, the actuator is in its normal position. In this state, the electrical contacts are either Open Circuit (infinite resistance, no current flows) or Closed Circuit (minimal resistance, current flows), depending on the design (Normally Open - NO, or Normally Closed - NC).
- Detection / Contact: When the target object physically presses against the actuator, it causes mechanical displacement. This displacement forces the internal electrical contacts to change state:
- If NO: Contacts close, significantly decreasing resistance, allowing current to flow.
- If NC: Contacts open, significantly increasing resistance, stopping current flow.
- Signal Output: This abrupt change in resistance (high to low, or low to high) is detected by the connected control system (like a PLC or microcontroller) as a clear digital signal - essentially an “ON” or “OFF” state. The system interprets this as the presence of the object.
Think of it as the sensor saying, “I have physically felt something push against me, and I’m changing my electrical state to report it.”
Where Resistive Proximity Sensors Shine: Key Applications

Their reliance on physical contact defines both their strengths and limitations, making them ideal for specific scenarios:
- Tactile Sensing & Object Confirmation: They are fundamental in applications requiring definitive confirmation of physical presence or position. Examples include:
- Verifying a workpiece is correctly seated in a fixture before machining begins.
- Detecting if a door or safety guard is completely closed (e.g., on a microwave, washing machine, or industrial machine).
- Confirming the end-of-travel position of a moving part (limit switches).
- Simple Push Buttons & Controls: Many momentary or latching push buttons found on appliances, keyboards, and control panels are fundamentally resistive proximity sensors. Pressing the button physically closes the contacts.
- Level Detection (Liquid/Solid): Float switches in tanks use a buoyant actuator that rises or falls with liquid level, opening or closing contacts at defined points.
- Robotics (Collision Detection/Sensing): Simple bump sensors on robots often use resistive switches to detect collisions with obstacles.
- Automotive: From brake pedal position sensing to detecting if the glove box is closed, numerous direct contact detections use resistive principles.
- Consumer Electronics: Detection of pop-up cameras retracting or simple mechanisms like a laptop closing onto a magnetic reed switch (a specialized resistive contact device).
Advantages: Embracing Simplicity
The fundamental operating principle delivers distinct benefits:
- Simplicity & Low Cost: The mechanical design is usually straightforward, leading to very cost-effective sensors. There’s no need for complex oscillators, specialized emitters/receivers, or sophisticated signal processing electronics for basic detection.
- Ease of Use & Integration: Connecting a simple switch output (NO/NC) is universally understood and easy to interface with almost any control system without complex setup or calibration.
- Reliable Detection (on Contact): For applications where positive, definitive contact is required, they provide an unambiguous signal. There’s no ambiguity about whether contact occurred.
- Insensitivity to Environmental Factors: Performance is generally unaffected by:
- Target material (metal, plastic, wood, liquid – as long as it can actuate the mechanism).
- Dust, dirt, oil, or other airborne contaminants (unless they physically jam the mechanism).
- Ambient light, sound, or most electromagnetic fields.
Limitations: Understanding the Boundaries
The core reliance on mechanical actuation introduces inherent constraints:
- Requires Physical Contact: This is the defining characteristic and limitation. They cannot detect objects without touching them. Non-contact detection is impossible.
- Mechanical Wear and Tear: The moving parts involved (plungers, springs, levers, contacts) are subject to wear over time, especially in high-cycle applications. This leads to potential reliability concerns and finite operational lifespans compared to solid-state non-contact sensors.
- Slower Response: Mechanical movement inherently takes more time than purely electronic sensing methods. While fast for many applications, they are unsuitable for detecting extremely high-speed events.
- Potential for Bounce: Mechanical contacts can “bounce” when closing or opening, causing brief, unintended signal fluctuations that may need filtering in the control software (debouncing).
- Limited Sensing Range: The “range” is essentially the travel distance of the actuator before the contacts change state, typically millimeters. They lack the longer detection ranges of inductive, capacitive, or photoelectric sensors.
Resistive vs. Other Proximity Sensors
It’s essential to contrast them with common non-contact types:
- Inductive Proximity Sensors: Detect metal objects without contact using an electromagnetic field. No moving parts. Ideal for metallic targets in dirty environments.
- Capacitive Proximity Sensors: Detect any material (metal, plastic, wood, liquid) without contact by sensing changes in capacitance. Can detect through non-metallic barriers.
- Photoelectric (Optical) Sensors: Use light beams (visible or infrared) to detect objects breaking the beam at a distance. Good for long ranges and non-contact detection of various materials.
- Ultrasonic Sensors: Use sound waves to detect the presence and distance of objects without contact. Effective for solid objects and liquid level sensing, tolerant to challenging environments.
Choosing the Right Tool: When Resistive Makes Sense
Selecting a resistive proximity sensor is optimal when:
- Definitive physical contact confirmation is the primary requirement.
- The target object will make contact as part of its normal operation.
- The environment is challenging (dirty, dusty, wet) but won’t physically jam the actuator.
- Cost sensitivity is a major factor.
- The application involves relatively low to moderate cycle rates to maximize lifespan.
- Simple On/Off detection is sufficient.
In essence: Resistive proximity sensors are the reliable workh