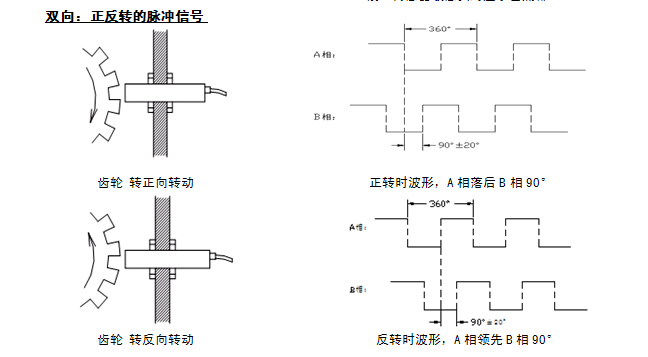
เซ็นเซอร์ความเร็วสองช่องข้างหน้าและกลับไม่มีการสัมผัสกับเกียร์ที่วัด, ไม่มีการสวมใส่, และติดตั้งง่าย. รูปคลื่นออกเป็นคลื่นสแควร์ที่มีวงจรหน้าที่ประมาณ 50%. เซนเซอร์มีลักษณะความถี่ต่ำและความถี่สูงที่ดี. ความถี่ต่ำสามารถสูงเท่า 0เฮอร์ทซ์, ซึ่งสามารถใช้ในการวัดความเร็วศูนย์ของเครื่องจักรหมุน. เนื่องจากเซนเซอร์สามารถให้สัญญาณความเร็วสองส่วนที่มีความแตกต่างในเฟสบางอย่าง, สามารถแยกการหมุนไปข้างหน้าและย้อนกลับได้; ความถี่สูงสามารถสูงเท่าที่ 20KHz, ซึ่งสามารถตอบสนองความต้องการของอุตสาหกรรมส่วนใหญ่. ความต้องการในการวัดความเร็วสูงในสนาม.

| Paramenters ผลิตภัณฑ์ |
| แหล่งจ่ายไฟที่ทำงาน | ยูบ=15วีดีซี±30% (8V~28V) |
| การใช้พลังงานปัจจุบัน | ≤35มิลลิเมตร |
| อุณหภูมิในการทำงาน | -40℃~125℃(หัว) |
| ความต้านทานการสั่นสะเทือน | การสั่นสะเทือน (10เฮอร์ทซ์~2KHz) 30g, ช็อค 100g |
| การปิดผนึก | ไอพี6813. |
| การป้องกันขั้วไฟฟ้า | ใช่ |
| การป้องกันลัดวงจร output | ใช่ |
| ความแข็งแรงของไฟฟ้า | 1000V 50เฮอร์ทซ์, 1นาที (ช่องและเชลล์) |
เซ็นเซอร์ความเร็วในการหมุนกลับใช้ในการตรวจจับความเร็วในการหมุนและความเร็วเส้นตรงของเพลาล้อ.&NbSp;
ผ่านการคำนวณและการประมวลผล, ความเร็วของวัตถุที่วัดได้ยังสามารถได้รับ.&NbSp;
เซนเซอร์มีลักษณะความถี่ต่ำและความถี่สูงที่ดี.&NbSp;
ความถี่ต่ำสามารถต่ำที่สุด 0เฮอร์ทซ์, ซึ่งใช้สำหรับความเร็วศูนย์ของเครื่องจักรหมุน, และสูงเท่าที่ 20KHz,&NbSp;
ซึ่งสามารถตอบสนองความต้องการในการวัดความเร็วสูงของสาขาอุตสาหกรรมส่วนใหญ่.&NbSp;
ตั้งแต่ YD69 สามารถให้สัญญาณความเร็วสองส่วนที่มีความแตกต่างระยะบางอย่าง, สามารถแยกการหมุนไปข้างหน้าและย้อนกลับได้.&NbSp;
ง่ายต่อการติดตั้ง, ไม่มีการติดต่อกับเครื่องมือวัด, และไม่มีการสวมใส่.&NbSp;
รูปคลื่นออกเป็นคลื่นสแควร์ที่มีวงจรหน้าที่ประมาณ 50%.&NbSp;
มีช่วงวัดความเร็วที่กว้างขวาง, ความสามารถในการปรับอุณหภูมิกว้าง, ความต้านทานการสั่นสะเทือนที่แข็งแกร่ง,&NbSp;
และมีการป้องกันความขั้วขั้วของแหล่งจ่ายไฟและการป้องกันวงจรสั้น.
1. การติดตั้งเซนเซอร์
● ตัวเหนี่ยวนำที่จะวัดคือตัวนำแม่เหล็กที่มีฟันหรือร่องบนมัน.
คำแนะนำ: โมดูลเกียร์วัดความเร็ว ≥1.7, วัสดุเป็นเหล็กคาร์บอนต่ำที่ซึมผ่านด้วยแม่เหล็ก
หมายเหตุ: ฟันหรือร่องที่ไม่เป็นมาตรฐานที่มีความกว้างที่แตกต่างกันจากพื้นผิวแบนจะทําให้เกิดการเปลี่ยนแปลงในอัตราส่วนความกว้างของรู.
● ช่องว่างในการติดตั้ง: 0.5-2มม, ค่าทั่วไปคือ 1.0มม
หมายเหตุ: ขึ้นอยู่กับสภาพการสั่นสะเทือนของส่วนประกอบที่ถูกทดสอบ
2. ลักษณะการผลิตเซนเซอร์
● ลักษณะการตอบสนองความถี่: 0~20KHz
●จำนวนช่องทางออก: คู่ช่อง
● รูปคลื่นออกผลิต: คลื่นสแควร์, เวลาขึ้นและลดขอบ 12ไมโครวินาที±40%
● ความกว้างของผลิต: ระดับสูง: ยู-0.7 (U: แรงดันไฟฟ้า), ระดับต่ำ: < 0.1V
●วงจรหน้าที่พัลส์: 50%±25%
● ความแตกต่างระยะ: 90±30° (ช่องทางแรกนำ)
หมายเหตุ: ขึ้นอยู่กับวิธีการติดตั้งและทิศทางการหมุนของส่วนหมุน.&NbSp;
พารามิเตอร์นี้ใช้กับวิธีการติดตั้งที่แสดงในรูป 4 ของคู่มือนี้.
● ความจุในการโหลด: ±20มิลลิเมตร (เหมาะสำหรับขนาดใหญ่)
● ความต้านทานการผลิต: <47โอ
● แรงดันไฟฟ้า: ยูบ=+24วีดีซี (5V~26V)
● การใช้พลังงานปัจจุบัน: ≤35มิลลิเมตร
● อุณหภูมิการทำงาน: -40℃~+125℃
● ความต้านทานการสั่นสะเทือน: การสั่นสะเทือน (10เฮอร์ทซ์~2KHz) 30g, ผลกระทบ 100g
● การปิดผนึก: ไอพี68
●การป้องกันขั้วไฟฟ้า: ใช่
● การป้องกันลัดวงจร output: ใช่
● ความแข็งแรงของไฟฟ้า: 1000V 50เฮอร์ทซ์, 1นาที (ช่องและเชลล์)
● วัสดุเปลือก: สแตนเลส 304 (วัสดุอื่น ๆ สามารถใช้ตามความต้องการของผู้ใช้)
1. หลักการวัดความเร็ว
เมื่อเกียร์วัดความเร็วหมุน,
เซนเซอร์จะสร้างสัญญาณคลื่นสี่เหลี่ยมด้วยความถี่ f (เฮอร์ทซ์) = N×M/60 (n คือความเร็วในการหมุน,&NbSp;
P คือจํานวนฟันเกียร์) สำหรับระบบควบคุมอิเล็กทรอนิกส์รถยนต์เพื่อตัวอย่าง&NbSp;
และตรวจจับความเร็วของรถไฟฟ้าและความเร็วของเครื่องยนต์ดีเซล. .
ตัวเหนี่ยวนำต้องเป็นตัวนำแม่เหล็ก, ซึ่งสามารถเป็นร่อง, หรือสกรูหรือเกียร์ที่โดดเด่น.
การใช้เซนเซอร์นี้ในการวัดความเร็วในการหมุนเกี่ยวข้องกับพารามิเตอร์ต่อไปนี้:
M—จํานวนตัวเหนี่ยวนำบนแม่เหล็กหมุนในการทดสอบ
N—ความเร็ว
f—ความถี่สัญญาณเข้า
S—ตั้งค่าสัมประสิทธิของเครื่องมือ (ขึ้นอยู่กับลักษณะของเครื่องมือวัดความเร็ว.&NbSp;
เครื่องมือวัดความเร็วบางอย่างกําหนดจำนวนฟันโดยตรง.&NbSp;
กรุณาเลือกสัมประสิทธิของเครื่องมือตามคู่มือคำแนะนำของเครื่องมือวัดความเร็วที่เลือก)
ความสัมพันธ์เป็นดังนี้:&NbSp;
N = เอส เอฟ = 60 f / M
หลังจากการกําหนดจํานวนของร่างกายตรวจจับของระบบการวัด, สัมประสิทธิการตั้งค่าเครื่องมือถูกกำหนดไว้.&NbSp;
สัมประสิทธิของแต่ละช่องถูกกําหนดตามจํานวนของร่างกายตรวจจับที่ตรงกับเซ็นเซอร์ของแต่ละช่อง.
ตัวอย่างเช่น, เมื่อวัดความเร็วในการหมุนของเพลาหมุน, มี 30ล้อเสียงฟันบนเพลา,&NbSp;
ซึ่งเท่ากับจํานวนฟันของร่างกาย Z = 30.&NbSp;
จากนั้นความถี่ออกโดยเซนเซอร์ต่อช่อง f = (30/60)N, และความเร็วในการหมุน n = 2f.&NbSp;
นั่นคือ, หมายเลขความถี่ที่วัดจะต้องคูณด้วย 2 เพื่อเท่ากับความเร็วจริง.&NbSp;
ตั้งค่าสัมประสิทธิของเครื่องมือวัดความเร็วที่ 2, นั่นคือ, S = 2, จากนั้นความเร็วจริงของโรเตอร์สามารถแสดงได้โดยตรง.&NbSp;
เช่นเดียวกัน, ถ้า 2 สัญญาณถูกสร้างขึ้นต่อการปฏิวัติ, ตั้งค่าสัมประสิทธิ์ s = 30, และอื่น ๆ.
3. หลักการวัดความแตกต่างกันไปข้างหน้าและย้อนกลับ
เซ็นเซอร์สองช่องฮอลล์สามารถใช้ในการกําหนดการหมุนไปข้างหน้าและย้อนกลับได้อย่างง่ายดาย.
ติดตั้งตามตัวอย่างการใช้งานในส่วนที่สี่ของคู่มือนี้.&NbSp;
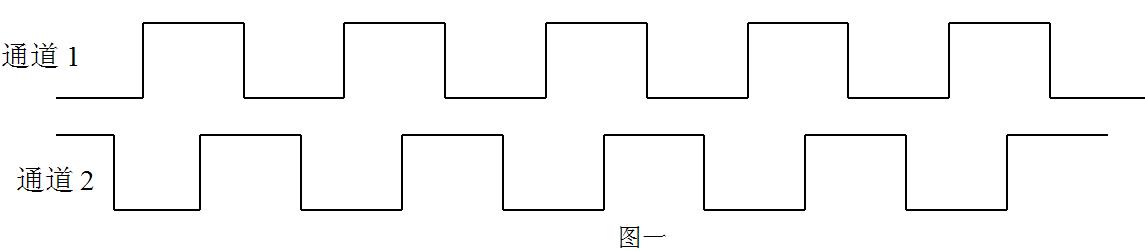
เมื่อทิศทางการหมุนได้รับการกําหนดเป็นการหมุนไปข้างหน้า ตามที่แสดงในรูป 4,&NbSp;
รูปคลื่นออกเป็นช่อง 1 ช่องชั้นนํา 2 โดย 90 องศา.&NbSp;
แผนรูปคลื่นมีดังนี้:
เมื่อทิศทางการหมุนเป็นตรงข้ามกับทิศทางที่แสดงในรูป 4,&NbSp;
ช่อง 2 รูปคลื่นจะนำช่อง 1 รูปคลื่นโดย 90 องศา.&NbSp;
แผนรูปคลื่นมีดังนี้:

ตามที่เห็นได้จากรูปข้างต้น,&NbSp;
ไปข้างหน้าและกลับสามารถแยกได้โดยการระบุเฟสของรูปคลื่นของช่อง 1 และ 2.